 Gary Marcus at NYU recently posted an interesting article on Why Making Robots is So Darn Hard. In it, he explores why consumer robots have not appeared to advance as quickly as computers, and why we don’t yet have Rosie the Robot cleaning our homes and cooking our meals.
Gary Marcus at NYU recently posted an interesting article on Why Making Robots is So Darn Hard. In it, he explores why consumer robots have not appeared to advance as quickly as computers, and why we don’t yet have Rosie the Robot cleaning our homes and cooking our meals.
I do think, however, he’s overlooked the incredible advances in humanoid robotics made by the hobbyist community in the last ten years. Perhaps that’s because most of those advances have been made in Japan (and more recently, Korea). The first Robo-One robots could barely stay on their feet for more than a few seconds. By 2009, we had hobby humanoids as big as a small adult human, able to lift their creators and transform into cars. And today, we see bots like Real King Kizer, which are only about a factor of 2 away from the fictional robots of Real Steel.
Gary’s article is well worth a read all the same. Check it out, and feel free to weigh in with your thoughts below.
I love this poster by Richard Sargent. It shows nearly every famous robot from pop culture, with Wall-E hidden among them. Robot fun for all ages!

 In honor of popular winter activities, here’s a neat project that made the rounds in 2009, but is well worth looking at again. Researchers in the Department for Automation, Biocybernetics and Robotics at the Jozef Stefan Institute in Slovenia developed a robot that can autonomously carve its way down a ski slope.
In honor of popular winter activities, here’s a neat project that made the rounds in 2009, but is well worth looking at again. Researchers in the Department for Automation, Biocybernetics and Robotics at the Jozef Stefan Institute in Slovenia developed a robot that can autonomously carve its way down a ski slope.
The robot has only three degrees of freedom, but a plethora of sensors, ranging from vision and inertial sensors to force sensors in the feet. The robot can see blue and red guide posts defining a slalom course, and navigate its way successfully through them. Or, when no guide posts are in sight, the robot can simply carve its way safely down the slope. You can find several good videos on YouTube, but the one below is the best for technically-minded robot enthusiasts such as yourself. Read more…
 Researchers at the University of Zurich‘s Artificial Intelligence Lab are laboring hard to deliver Roboy, an advanced humanoid robot. Roboy is nearing the third trimester of his 9-month gestation, and is expected to be delivered to the world March 8-9th, 2013 at the “Robots on Tour” exhibition in Zurich. Check out the promotional video below.
Researchers at the University of Zurich‘s Artificial Intelligence Lab are laboring hard to deliver Roboy, an advanced humanoid robot. Roboy is nearing the third trimester of his 9-month gestation, and is expected to be delivered to the world March 8-9th, 2013 at the “Robots on Tour” exhibition in Zurich. Check out the promotional video below.
Or, “How to make a two-legged walker with few degrees of freedom.”
One thing I’ve always been fascinated by is making walking biped robots with limited degrees of freedom (DOF). Each degree of freedom requires a servo, and servos strong enough for a biped walker tend to be expensive. In addition, more servos means more weight, and more weight requires stronger servos; this explains why any good humanoid robot (with 16 DOF or more) is likely to cost $1000 or more. For people new to the hobby, this is likely to be too big an investment to make right away. It’s so much better to start smaller, and work out all the command & control issues while feeding one’s growing addiction with a lower-cost robot.
This leads to the natural question: how many servos do you really need to make a walking biped? In this blog post, I’ll attempt to answer that question with a quick survey of low-DOF biped robots. Read more…
Giant fighting robots in Japanese science fiction never seem able to finish the job with guns and missiles alone — sooner or later, they have to get in close, pull out a sword, and settle things medieval style. A new Robo-One style robot demonstrated at Maker Faire Tokyo 2012 can do just that. Check out the cool new video caught by Lem Fugitt of Robots-Dreams fame:
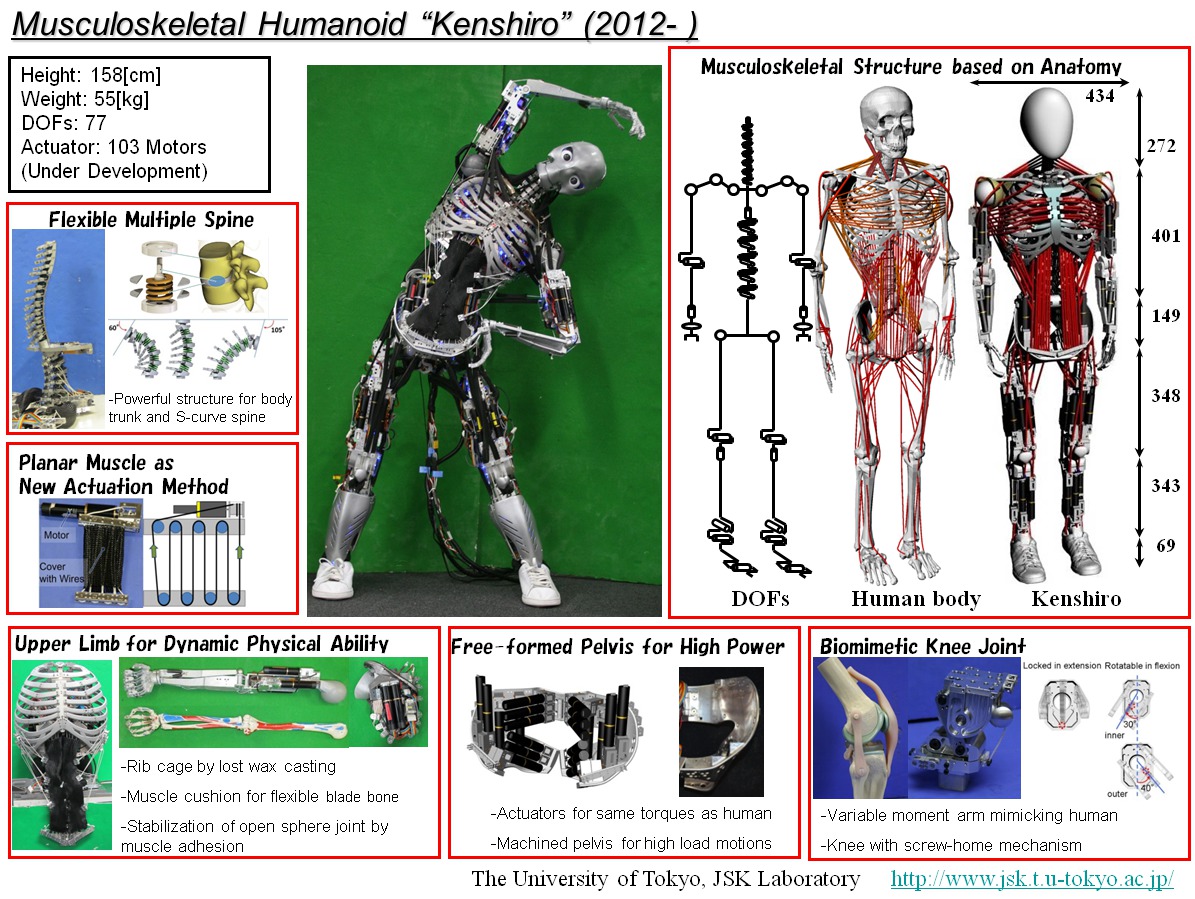
Yuto Nakanishi and colleagues at the University of Tokyo‘s JSK Laboratory have unveiled Kenshiro, a full-sized humanoid robot built with bones, ligaments, and pulley-style muscles modeled closely after human anatomy. The robot features 160 actuators: 50 in the legs, 76 in the trunk, 12 in the shoulder, and 22 in the neck. Weight, torque, and joint speeds are all as close as they could get to human, though the joints are quite a bit on the slow side; we don’t yet have actuators that can match the size, speed, and weight of real muscle. But Kenshiro gets about as close as it is possible to get with current technology. See Kenshiro (sometimes in parts) demonstrating its moves in the video below.
 The Computational Neuroscience Research Group at the Waterloo Centre for Theoretical Neuroscience has developed a large-scale model of a functioning mammalian brain using spiking neurons. While other large-scale brain simulations have been done by other groups, this is the first simulation to include all the necessary components to actually perform a real task, from perception all the way to motor control.
The Computational Neuroscience Research Group at the Waterloo Centre for Theoretical Neuroscience has developed a large-scale model of a functioning mammalian brain using spiking neurons. While other large-scale brain simulations have been done by other groups, this is the first simulation to include all the necessary components to actually perform a real task, from perception all the way to motor control.
A recent paper about the project is entitled Spaun: A Perception-Cognition-Action Model Using Spiking Neurons (available online). The paper, by Terry Stewart, Xuan Choo, and Chris Eliasmith, all at the University of Waterloo, presents an overview of the neural architecture, how it functions, and what it can do. Here’s the paper abstract: Read more…
The other day, I configured four Herkulex servos for use at 57600 baud, so I could communicate with them from an Arduino‘s software serial port. Here’s what happened next.
I had previously started on my own Arduino library for communicating with these servos. Then my brother, whose google-jutsu is apparently stronger than mine, sent me a link to this page. It turns out that Dongbu has an Arduino HerkuleX library already available, and mine was still at the blinky-light stage, so I decided to download it and give it a try. Read more…
Researchers at University of Texas at Dallas have developed a new type of actuator with some pretty amazing properties. These “artificial muscles” are made from carbon nanotubes, twisted into yarn and infused with paraffin wax. The fibers can lift more than 100,000 times their own weight, and generate 85 times more mechanical power than same-sized natural muscle, according to a recent press release.

Lead researcher Ray Baughman says “the artificial muscles that we’ve developed can provide large, ultrafast contractions to lift weights that are 200 times heavier than possible for a natural muscle of the same size.” Read more…
